

18001132774


UAV flight simulation technology solution2017-08-21 00:00Views:41times
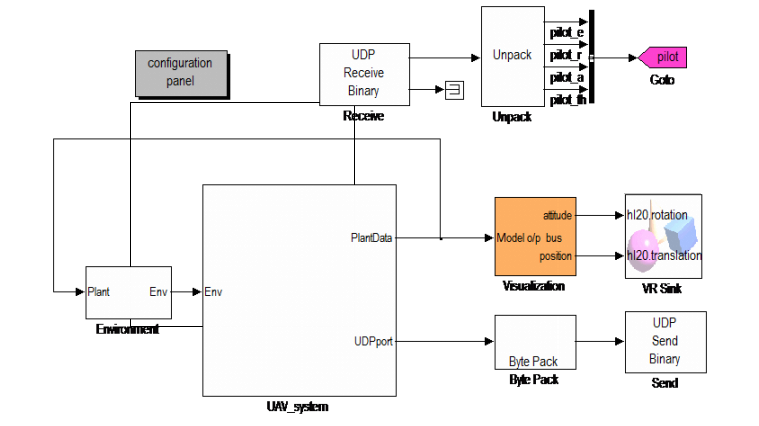
At present, the working conditions of unmanned aerial vehicle (UAV) are becoming more and more complex and demanding, and the task requires high accuracy. At the same time, it is necessary to ensure the high reliability of uav. Therefore, the complexity of UAV system is increasing day by day, the development is difficult, the development cycle is long, and the iterative updating of the corresponding control system is also hindered. In the field of UAV flight control Kyoto to UAV Simulation System Modeling, UAV semi physical simulation and other related fields for further research, and to undertake a large number of UAV flight simulation technology of the project, has a wealth of UAV flight simulation modeling and debugging experience. Kyoto measurement and control can provide a variety of services in the field of UAV flight simulation, including: • provide a comprehensive simulation platform for evaluating the quality of aircraft systems; • provides a fully digital universal UAV flight simulation system model; • provide model simulation of UAVs, subsystems, such as navigation systems, flight control systems, and engine control systems; At the stage of UAV overall scheme demonstration, by replacing or modifying UAV aerodynamic data and overall data, qualitative and quantitative analysis is made by using simulation results given by flight simulation system; At the stage of UAV design and verification, using the model data and equipment interface provided by UAV flight simulation system, the UAV is connected with the real parts of the UAV system, and various flight simulation tests are carried out. Solution The UAV Simulation model is implemented by MATLAB/Simulink, the UAV flight dynamics model, control model, navigation model is built by Simulink, the simulation model parameter settings to achieve through the MATLAB development. The composition of the system is shown below:
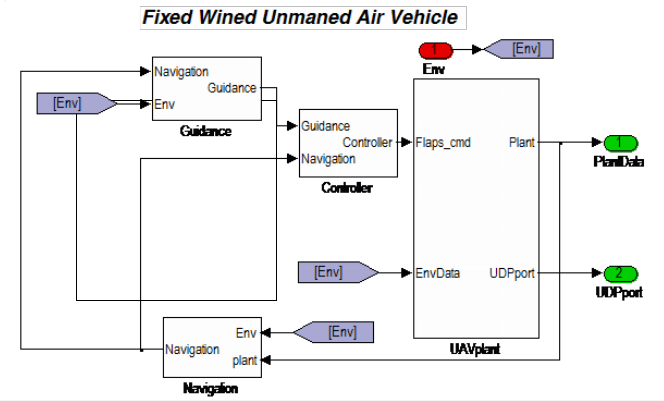
Figure 1 UAV Simulation Model Diagram No UAV flight simulation system model as shown in Figure 1 using the simulation, simulation system is mainly composed by the environment module, UAV system module, parameter setting module, joystick signal processing module and other components. The key key technologies are as follows: Environment module In the environment module, the terrain factor, wind field factor, atmospheric condition factor and gravity acceleration factor are mainly considered. The terrain environment can be set up according to the user's needs. The wind field is constructed by Simulink's own wind shear module, turbulence module and discrete gust module. Joystick signal processing module UAV flight simulation system model with joystick control, can receive instructions, send the throttle lever without the regulation of instruction and instruction and lifting attitude, model solution based on the instruction received data, to achieve control of the UAV attitude and flight height, convenient user simulation for UAV driving. UAV module The UAV system module is shown below. The module contains all the functional modules, such as the UAV dynamics model, navigation, engine and control module. First of all, to the trajectory guidance module attitude signal control module gives the current flight phase, these signals by adjusting the amount of deflection and the thrust control law for UAV model design to calculate the required to complete the mission of each rudder is needed in the control module, and transmits these data to control the UAV dynamics model. The UAV dynamic model according to the current state of motion and manipulation of data, calculate in the absence of all external forces, torque of UAV, the calculation also depends on the model initialization defined the UAV aerodynamic derivative data, these data can be in the initial attribute change module. The force and torque, according to the six degree of freedom dynamics module can calculate the free motion data man-machine new, these data will continue to exercise state power and environmental parameters of gas iterative calculation module to calculate the UAV model following the flight parameters, so cycle iterative solution for a period of time of UAV the.
Figure 1 UAV Simulation Model Diagram No UAV flight simulation system model as shown in Figure 1 using the simulation, simulation system is mainly composed by the environment module, UAV system module, parameter setting module, joystick signal processing module and other components. The key key technologies are as follows: Environment module In the environment module, the terrain factor, wind field factor, atmospheric condition factor and gravity acceleration factor are mainly considered. The terrain environment can be set up according to the user's needs. The wind field is constructed by Simulink's own wind shear module, turbulence module and discrete gust module. Joystick signal processing module UAV flight simulation system model with joystick control, can receive instructions, send the throttle lever without the regulation of instruction and instruction and lifting attitude, model solution based on the instruction received data, to achieve control of the UAV attitude and flight height, convenient user simulation for UAV driving. UAV module The UAV system module is shown below. The module contains all the functional modules, such as the UAV dynamics model, navigation, engine and control module. First of all, to the trajectory guidance module attitude signal control module gives the current flight phase, these signals by adjusting the amount of deflection and the thrust control law for UAV model design to calculate the required to complete the mission of each rudder is needed in the control module, and transmits these data to control the UAV dynamics model. The UAV dynamic model according to the current state of motion and manipulation of data, calculate in the absence of all external forces, torque of UAV, the calculation also depends on the model initialization defined the UAV aerodynamic derivative data, these data can be in the initial attribute change module. The force and torque, according to the six degree of freedom dynamics module can calculate the free motion data man-machine new, these data will continue to exercise state power and environmental parameters of gas iterative calculation module to calculate the UAV model following the flight parameters, so cycle iterative solution for a period of time of UAV the.
|

| 关注我们 |  |  |  |
Q Q:253219688 T E L:18001132774 FA X:400-0000-0000 MAIL:info@contrsim.com ADD: Huilongguan Huoying Guofeng Meitang Complex Building of Changping District in Beijing, China. |